ラック&ピニオン機構とは?回転を直線運動に変える設計入門
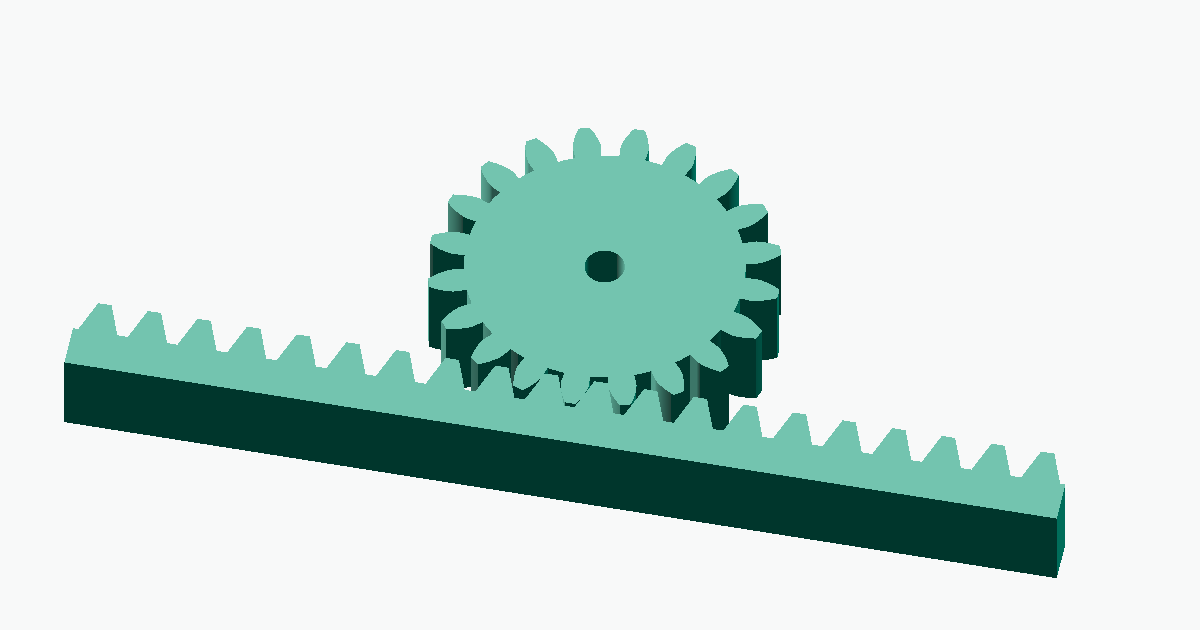
ラックアンドピニオンは、回転運動を直線運動に変換する最も基本的な歯車機構です。回転する小歯車(ピニオン)と、平らな棒状の歯をもつ歯車(ラック)をかみ合わせることで、ピニオンの回転がラックの直進運動に変わります。CNC工作機械の送り機構、自動車のステアリング、昇降ステージ、3Dプリンタの軸駆動など、回転運動を直線運動に変換したいさまざまな場面で利用されています。meta-maticでは、ピニオンを 平歯車ジェネレーター、ラックを ラックギアジェネレーター で生成し、2つを組み合わせるだけでこの機構を設計できます。本ガイドでは、ラック&ピニオンの原理、移動量の計算方法、ピニオンとラックの設計、STEPファイルの生成手順までを解説します。
ラック&ピニオンとは
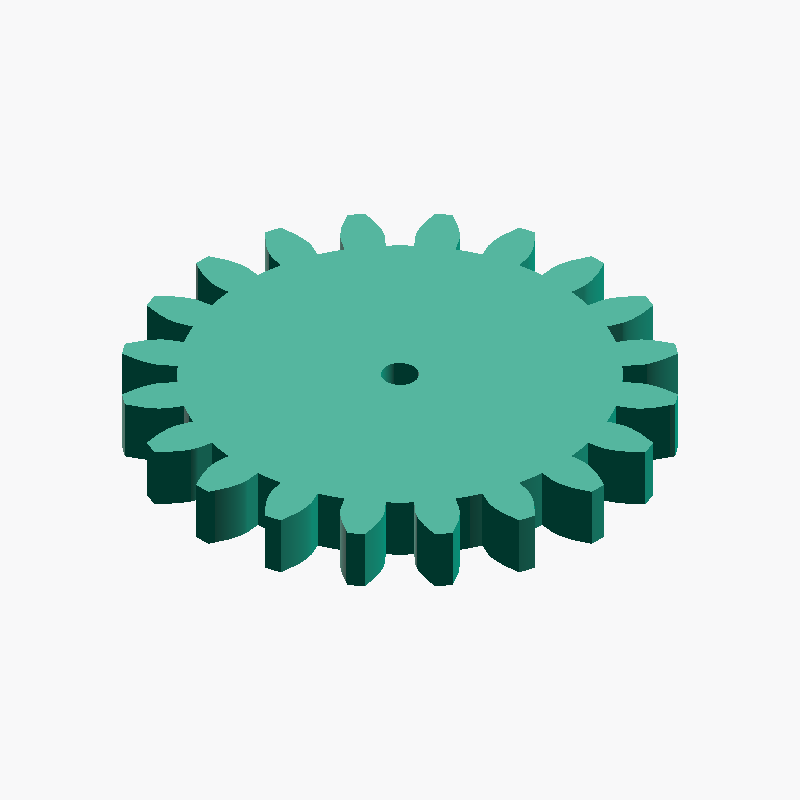
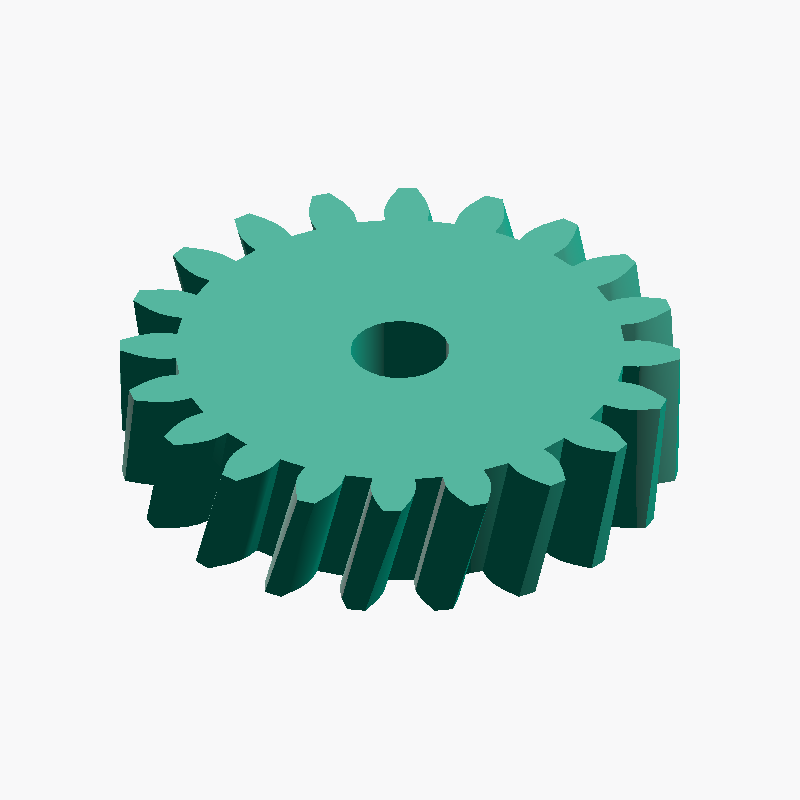
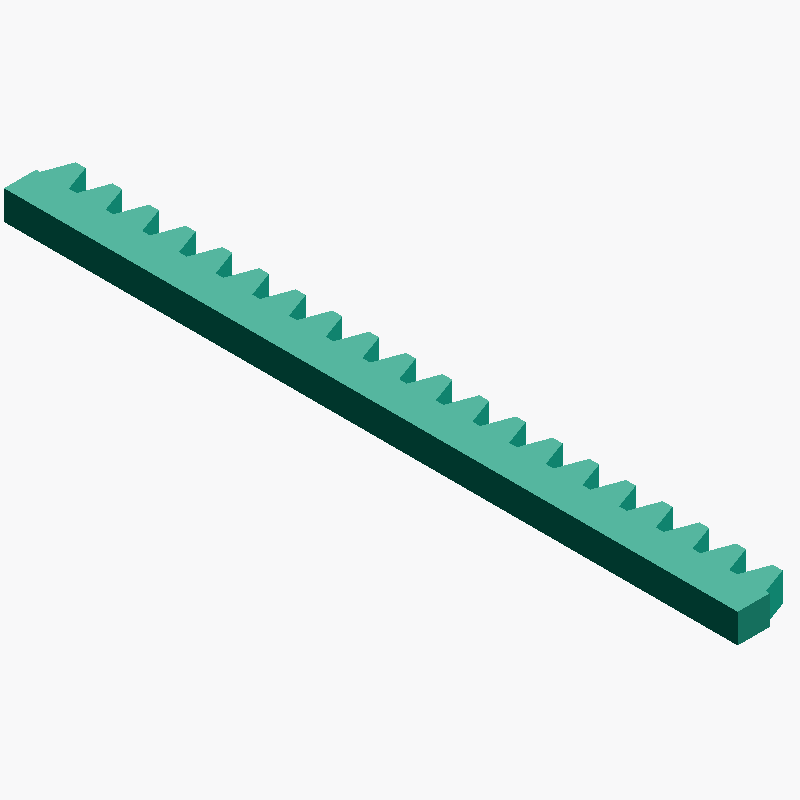
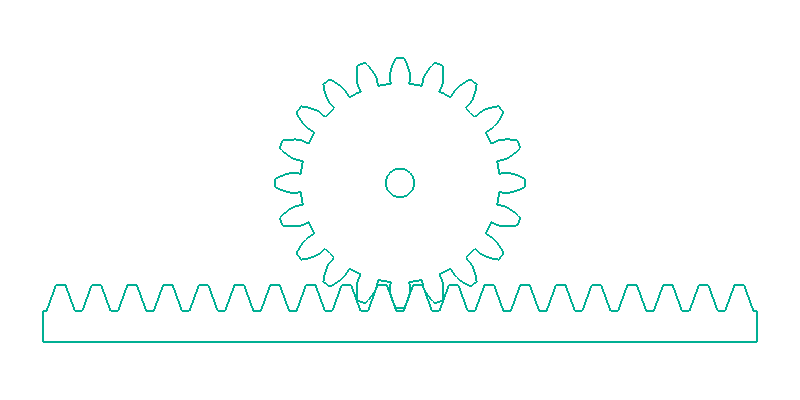
ラック&ピニオンは、ピニオン(小さな平歯車)とラック(直線状の歯車)という2つの部品で構成されます。ラックは、平歯車のピッチ円(基準円)半径を無限大にしたと考えられる直線状の歯車です。半径が無限大になるとインボリュート曲線は直線に近づくため、ラックの歯面は直線(台形歯形)になり、この直線歯面がピニオンのインボリュート歯形と正しくかみ合います。ピニオンが回転すると、かみ合った歯がラックを押し、ラックがまっすぐに移動します。逆に、ラックを動かせばピニオンが回転するので、回転⇄直進の双方向の変換ができます。
meta-maticのピニオン(平歯車)とラックは、どちらも圧力角20°・歯末のたけ 1.0m・歯元のたけ 1.25m・バックラッシュ 0 を固定パラメータとして共有しています。同じモジュールで生成すれば、設計上は正しくかみ合う歯形になります。
メリットとデメリット
ボールねじやベルト駆動などの代表的な直線運動機構を比較すると、ラック&ピニオンには長所・短所がそれぞれあります。機構選定の参考にしてください。
主なメリット
- 長いストロークに対応 : ラックを長く(または継ぎ足して)することで、大きな移動距離に対応できる
- 高速移動が得意 : ピニオン1回転で
π×m×zと大きく動くため、速い送りに向く - 構造が単純 : ピニオンとラックだけで成立し、STEPファイル化や3Dプリントがしやすい
主なデメリット
- バックラッシュが出やすい : 歯のすき間により、わずかな遊び(がたつき)が生じる
- 位置決め精度はボールねじに劣る : 高い位置決め精度が必要な用途ではボールねじが有利
- 潤滑・摩耗対策が必要 : 金属どうしでは給脂、樹脂では摩耗や歯欠けを考慮する
回転と直線運動の関係
ラック&ピニオンの最大の特徴は、ピニオンの回転量とラックの移動量が比例することです。ピニオンが1回転すると、ラックはピニオンのピッチ円円周に相当する距離だけ移動します。ピッチ円直径を d、モジュールを m、ピニオンの歯数を z とすると、ピッチ円直径は d = m × z なので、ピニオン1回転あたりの移動量は次の式で求められます。
ピニオン1回転あたりの移動量 = π × d = π × m × z
例えば、モジュール2・歯数20のピニオンなら、1回転で π × 2 × 20 ≒ 125.7mm 移動します。ピニオンを θ 度だけ回したときの移動量は、(θ ÷ 360) × π × m × z で計算できます。この比例関係のおかげで、ステッピングモーターと組み合わせれば、回転角から移動距離を正確に制御することができます。
| ピニオンの回転 | 移動量の式 | m=2・z=20 の例 |
|---|---|---|
| 1回転(360°) | π × m × z | 125.7 mm |
| 半回転(180°) | π × m × z ÷ 2 | 62.8 mm |
| 歯1枚分(360/z°) | π × m | 6.28 mm |
p = π × m で、ピニオンが歯1枚分回るとラックも歯1枚分(π×m)進みます。ピニオンとラックのモジュールが同じなら、このピッチが一致するため正しくかみ合います。ピニオンとラックの設計
ラック&ピニオンを設計するときは、ピニオンとラックのモジュールを必ず同じ値にそろえることが大前提です。モジュールが違うと歯のピッチが合わず、まったくかみ合いません。モジュールをそろえたうえで、ピニオンの歯数とラックの長さを用途に合わせて選定します。
- モジュール : ピニオンとラックで同じ値にそろえる。大きいほど歯が頑丈・高トルク向き、小さいほど細かく滑らか
- ピニオン歯数 : 1回転あたりの移動量(
π×m×z)と外径を左右する。最小歯数は17枚(アンダーカット限界) - ラックの長さ : 必要な移動距離(ストローク)に、ピニオンが端でも噛み合う余裕を加えた長さにする
F = T ÷ r(T: モータートルク、r: ピッチ円半径)で決まるため、同じモータートルクならピッチ円半径が大きいほど推力は小さくなります。つまり同じモータートルクで比べると、歯数を減らす(ピッチ円半径を小さくする)ほど移動は遅くなりますが、推力は大きくなります。速度と力のバランスで歯数を選びます。主要寸法と移動量の計算
ラック&ピニオンの主要寸法は、モジュール m とピニオン歯数 z から計算できます。組み立て時の位置決めに必要な寸法は次のとおりです。
| 名称 | 記号・式 | m=2・z=20 の例 |
|---|---|---|
| ピニオンピッチ円直径 | d = m × z | 40.00 mm |
| ピニオン歯先円直径 | Da = m × (z + 2) | 44.00 mm |
| ピニオン1回転の移動量 | π × m × z | 125.7 mm |
| ラックのピッチ | p = π × m | 6.28 mm |
組み立てで最も重要なのは、ピニオンの軸中心とラックのピッチラインの距離です。ピニオンのピッチ円がラックのピッチライン(歯先から歯末のたけ m だけ下がった線)にちょうど接するように、ピニオン軸を ピッチ半径 = m × z ÷ 2(例: m=2・z=20 なら 20mm)だけ離して配置します。この距離が近すぎると歯どうしが食い込み、遠すぎると遊びが大きくなって正しく動作しません。
ステッピングモーターでの駆動例
ラック&ピニオンは回転角と移動量が比例するため、ステッピングモーターと組み合わせると移動距離をステップ単位で正確に制御できます。CNCやガントリー、XYステージなどの自作でよく使われる構成です。1ステップあたりの移動量(分解能)は次の式で求まります。
1ステップの移動量 = π × m × z ÷ (1回転あたりのステップ数)
例えば、一般的な NEMA17 ステッピングモーター(200ステップ/回転) に、モジュール1・歯数20のピニオンを取り付けた場合の分解能は π × 1 × 20 ÷ 200 ≒ 0.314mm/ステップ です。さらに 1/16 マイクロステップ駆動を使えば 0.314 ÷ 16 ≒ 0.02mm まで細かくできます。モーターのステップ数とピニオン寸法から分解能を求めるには steps/mm計算ツール が便利です。
STEPファイルの生成手順
meta-maticでは、ピニオンとラックをそれぞれのジェネレーターで生成し、CAD上で組み合わせます。どちらもブラウザ上でパラメータを入力するだけでSTEPファイルをダウンロードできます。
モジュールを決める
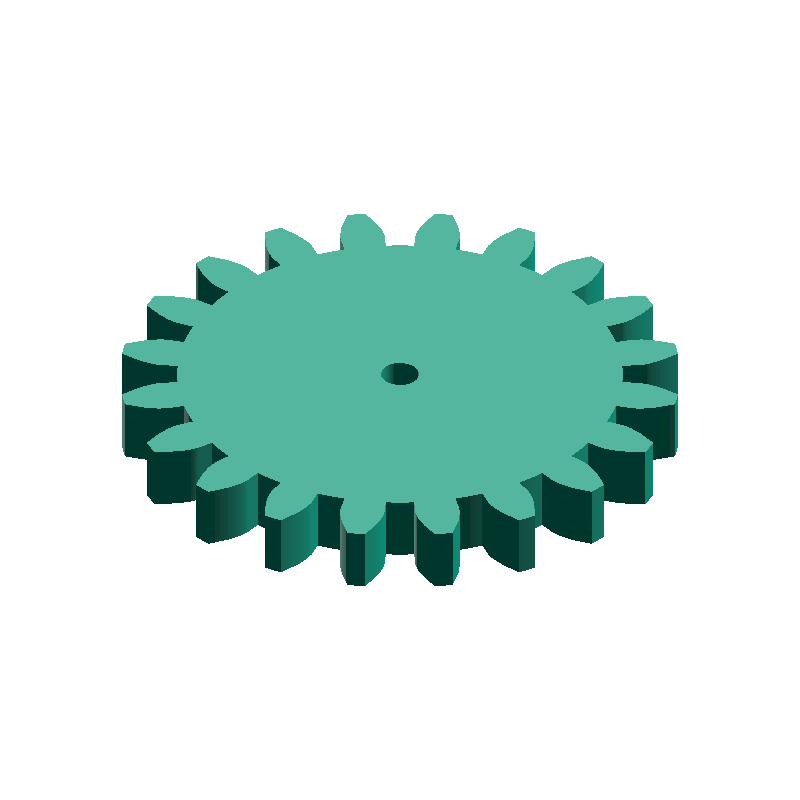
ピニオンとラックで共通のモジュールを決めます。必要な推力や精度、相手部品との兼ね合いから選びます。ピニオンを生成する
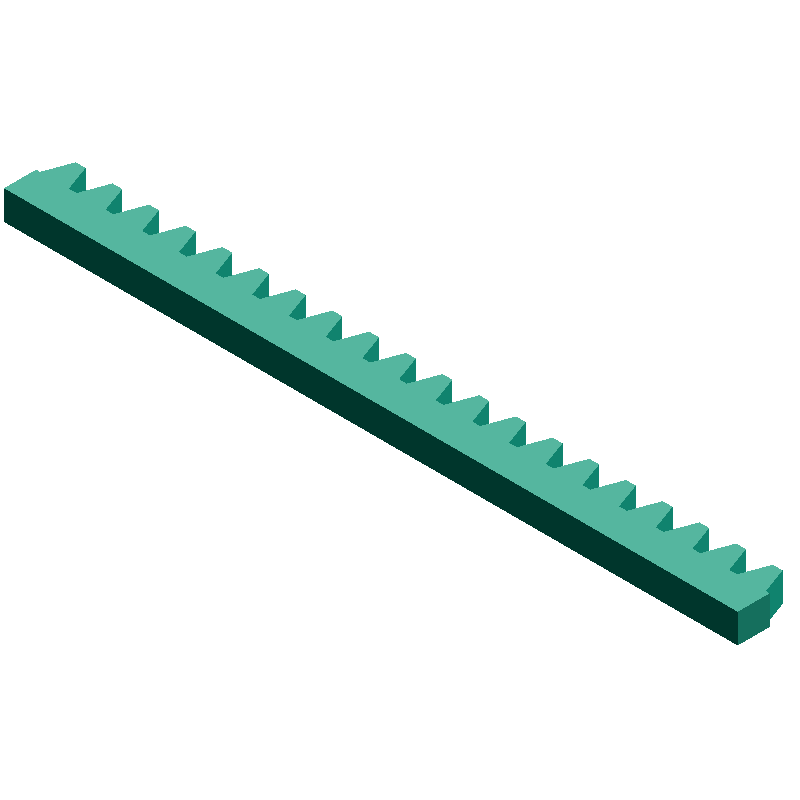
平歯車ジェネレーターで、決めたモジュール・ピニオン歯数・軸穴径・歯幅を入力してSTEPファイルを生成します。ラックを生成する
ラックギアジェネレーターで、同じモジュール・必要な歯数(長さ)・高さ・幅を入力してSTEPファイルを生成します。CADで組み立てる
Fusion 360 / SolidWorks / FreeCAD などで両ファイルを開き、ピニオン軸とラックのピッチラインの距離をピッチ半径(m×z÷2)に合わせて配置します。噛み合いを確認する
ピニオンを回転させて、ラックが滑らかに直進するか、歯の食い込みや過大な遊びがないかをアセンブリ上で検証します。
3Dプリント・組み立ての注意点
ラック&ピニオンは3Dプリントでも製作できますが、直線運動の滑らかさは歯面の精度とラックの真っすぐさに左右されます。次の点に注意すると実用的な機構になります。
- バックラッシュ(遊び) : 本ツールはバックラッシュ0で生成するため、3Dプリントの公差を考えると食い込みやすい。ピニオンとラックの中心距離をわずかに調整したり、歯面を軽く仕上げたりすると、動きが滑らかになる場合がある
- ラックの反り対策 : 長いラックはプリント時に反りやすい。ベッド密着を高め、必要ならラックを分割して印刷し連結する
- ピニオン軸の支持 : ピニオンが浮くと噛み合いが浅くなる。軸受けでしっかり支持し、ラックとの距離を一定に保つ
- プリント方向 : ラックは歯面を上向き、ピニオンは軸をZ軸に立てると歯形精度が出やすい
- 素材 : 一般用途はPLAやPETG、摩耗が気になる用途ではNylonなどが向く
よくある質問
Qピニオンとラックのモジュールは同じでないとダメですか?
Qラックはどのくらいの長さにすればよいですか?
Qラック&ピニオンはどんな用途に使われますか?
Qピニオンの歯数に下限はありますか?
Qどのくらいの位置決め精度が出せますか?
関連リソース
ラック&ピニオンの設計に役立つジェネレーターや、関連する解説記事・計算ツールをまとめました。用途に応じて使い分けてください。
- 平歯車(スパーギア)解説記事 — ピニオンに使う平歯車の歯数・軸穴径・歯幅の選び方
- 歯車のモジュール解説記事 — モジュールの決め方と市販ギアとの組み合わせ方
- steps/mm計算ツール — ステップ数とピニオン寸法から1ステップの移動量を自動計算
- 歯車比・減速比計算ツール — 駆動側と従動側の歯数から減速比を自動計算